ロボット機構の勉強中 [電子工作]

今年の「知ロボ」では、 ロボットの機構についてちょっと勉強した上で、 詳しく拝見させていただきました。
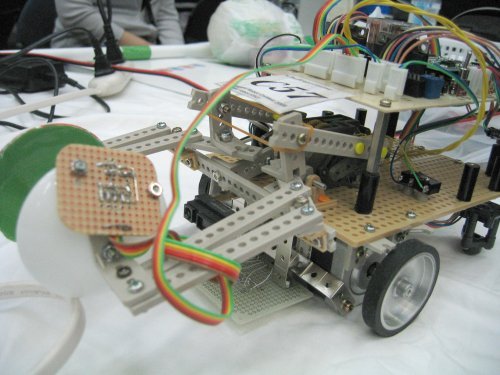
これは、チャレンジコース二次予選まで残ったロボットです。 私が気に入った理由は、ズバリ、使用しているモータが少ないことです。
移動には、左右のステッピングモータを使用しています。 そして、ボールをつかむための腕にDCモータが使用されています。 以上、全部で三つのモータだけで動きます。
腕が開いたことを検出するために使用されているのが、マイクロスイッチです。 しかも、腕から糸が伸びていてマイクロスイッチにつながっているチープな設計。 凄い。 (もちろん、「チープ」は、ほめ言葉です。)
「本当は、サーボを使いたかった」との言葉に 「もったいない。代わりに加速度センサはいかがですか?」としっかり、宣伝しておきました。
参考文献

- 作者: 鈴森 康一
- 出版社/メーカー: コロナ社
- 発売日: 2004/04
- メディア: 単行本
2008-06-23 22:30
nice!(0)
コメント(3)
トラックバック(0)




>「本当は、サーボを使いたかった」との言葉に 「もったいない。代わりに加速度センサはいかがですか?」としっかり、宣伝しておきました。
MEMS加速度センサは、腕立て君のように水平に対する傾きを検出するのには充分ですが、重力が効かない水平方向の運動に対して、位置、角度検出に使用するのは現状の精度・安定度では無理があるでしょう。もう5〜6年前になりますが、私もアナデバのADXL202が出た頃にしばらくいじってみてこういう感想を持ちました。最近のデバイスはだいぶ改良されたようですが、なひたふさんのこの記事を見ると、まだまだのようですね。
6軸加速度センサの動作実験
http://nahitafu.cocolog-nifty.com/nahitafu/2008/03/6_0872.html
by Tsuneo (2008-06-25 08:48)
> 重力が効かない水平方向の運動に対して
水平方向の運動を垂直方向の運動に物理的に変換すれば、何とかなるかもしれないというシロウトの発想を試してみようかと考えています。これが出来たら、すべてのロータリーエンコーダは、加速度センサで置き換えられます。
# かなり、妄想に近いと自覚はしているのですが。
by noritan (2008-06-25 09:02)
ロータリーエンコーダは、OHPシートに放射状のパターンをインクジェットプリンタで印刷して、フォトアイソレータで挟めば、すぐ出来ますよ。これに対抗するには、かなりメカ部分を簡単なものにしないと :-)
by Tsuneo (2008-06-25 22:56)