PSoC 3 で、倍増器を作った [PSoC]


前回の FIFO の実験では、 FIFO に入れたデータがそのまま FIFO から出てきました。 このデータを途中で加工してやると、計算機が出来上がります。 今回は、入れたデータの値の二倍の値のデータが出てくる、名付けて倍増器を作ります。
データフロー図

今回は、データパスの動作をデータフローで表現しました。 左端にある "state" が、データパスを制御するステートマシンの状態です。 そして、橙色の破線が、クロックタイミングを表現しています。 つまり、この倍増器の場合、 FIFO0 にデータが到着してから FIFO1 にデータが出てくるまで、4クロックを要するという事になります。
- IDLE
この図では省略されていますが、 IDLE 状態では、 FIFO0 へのデータの到着を待っています。 データパスから出力される制御信号 f0_blk_stat (f0_empty) が、データの到着を知らせてくれます。 データが到着したら、次の GET 状態に遷移します。
- GET
データが到着したら、1クロックで、二つの作業を同時に行います。
一つは、 ALU を使って、アキュムレータ A0 の値を更新することです。 この時に使用される演算は、 A0 XOR A0 で、 A0 をゼロにクリアします。 XOR 演算は、ビットごとの排他的論理和を表現しています。 この XOR 演算に同じ値を与えると、与えた値がどのような値でも、結果が "0" になるという性質を利用したものです。
もうひとつの作業は、 FIFO0 に到着したデータをデータレジスタ D0 にコピーすることです。 制御信号 d0_load をアサートすると、 FIFO0 から D0 にデータがコピーされます。 この図では、 "d" というデータがコピーされてきます。 単に2倍の値を計算するためであれば、アキュムレータにデータをコピーするという選択肢もありますが、ここでは、後の拡張を考慮してデータレジスタを使用しています。
GET 状態の次は、 ADD 状態に遷移します。
- ADD
この状態では、 ALU を使用して A0 + D0 の演算を行い、 A0 に格納します。 GET 状態で、 A0 にはゼロ、 D0 には "d" が格納されましたので、この状態では A0 に "d" が格納されることになります。 次は、 DOUBLE 状態に遷移します。
- DOUBLE
この状態では、 ALU を使用して A0 + A0 の演算を行い、 A0 に格納します。 A0 の値は、 "2d" となります。 つまり、このステップでは、 A0 の値が2倍されたことになります。 次は、 WAIT 状態に遷移します。
- WAIT
この図では省略されていますが、 WAIT 状態では、データパスの制御信号 f1_blk_stat (f1_full) を使って FIFO1 にデータを書き込めるようになるまで、待ち合わせを行います。 FIFO1 が受け入れ可能な状態になったら、 PUT 状態に遷移します。
- PUT
この状態では、データパスの制御信号 f1_load をアサートすることで、 A0 の値 "2d" を ALU を介して FIFO1 に書き込みます。
FIFO1 の書き込みには、 A0 の値を直接書き込む機能もあるのですが、今回は、 ALU を経由する方法を採用しています。 これは、 FIFO1 への書き込み経路が、データパスの機能上、動的に設定できる項目ではないという事情があるためです。 ALU を介する設定を使用することで、柔軟にデータの経路を決めることができます。
データを FIFO1 に書き込んだら、次のデータの到着を待つため、 IDLE 状態に遷移します。
倍増器の実装
以上、倍増器の説明をデータフローで解説しました。 あとは、倍増器の実装を Verilog で記述していくだけです。
//`#start header` -- edit after this line, do not edit this line
// ========================================
//
// Copyright noritan.org, 2013
// All Rights Reserved
// UNPUBLISHED, LICENSED SOFTWARE.
//
// CONFIDENTIAL AND PROPRIETARY INFORMATION
// WHICH IS THE PROPERTY OF NORITAN.ORG.
//
// ========================================
`include "cypress.v"
//`#end` -- edit above this line, do not edit this line
// Generated on 05/18/2013 at 21:08
// Component: DoublerAdd
module DoublerAdd (
input clock,
input en,
input reset
);
//`#start body` -- edit after this line, do not edit this line
// State code declaration
localparam ST_IDLE = 3'b000;
localparam ST_GET = 3'b001;
localparam ST_ADD = 3'b010;
localparam ST_DOUBLE = 3'b011;
localparam ST_WAIT = 3'b100;
localparam ST_PUT = 3'b101;
// Datapath function declaration
localparam CS_IDLE = 3'b000;
localparam CS_CLEAR = 3'b001;
localparam CS_ADD = 3'b010;
localparam CS_DOUBLE = 3'b011;
// Wire declaration
wire[2:0] state; // State code
wire f0_empty; // F0 is EMPTY
wire f1_full; // F1 is FULL
// Pseudo register
reg[2:0] addr; // Datapath function
reg d0_load; // LOAD D0 from F0
reg f1_load; // LOAD F1
// State machine behavior
reg [2:0] state_reg;
always @(posedge reset or posedge clock) begin
if (reset) begin
state_reg <= ST_IDLE;
end else casez (state)
ST_IDLE:
if (en & !f0_empty) begin
state_reg <= ST_GET;
end
ST_GET:
state_reg <= ST_ADD;
ST_ADD:
state_reg <= ST_DOUBLE;
ST_DOUBLE:
state_reg <= ST_WAIT;
ST_WAIT:
if (!f1_full) begin
state_reg <= ST_PUT;
end
/*ST_PUT*/ default:
state_reg <= ST_IDLE;
endcase
end
assign state = state_reg;
// Internal control signals
always @(state) begin
casez (state)
ST_IDLE: begin
addr = CS_IDLE;
d0_load = 1'b0;
f1_load = 1'b0;
end
ST_GET: begin
addr = CS_CLEAR;
d0_load = 1'b1;
f1_load = 1'b0;
end
ST_ADD: begin
addr = CS_ADD;
d0_load = 1'b0;
f1_load = 1'b0;
end
ST_DOUBLE: begin
addr = CS_DOUBLE;
d0_load = 1'b0;
f1_load = 1'b0;
end
ST_WAIT: begin
addr = CS_IDLE;
d0_load = 1'b0;
f1_load = 1'b0;
end
/*ST_PUT*/ default: begin
addr = CS_IDLE;
d0_load = 1'b0;
f1_load = 1'b1;
end
endcase
end
cy_psoc3_dp8 #(.cy_dpconfig_a(
{
`CS_ALU_OP_PASS, `CS_SRCA_A0, `CS_SRCB_D0,
`CS_SHFT_OP_PASS, `CS_A0_SRC_NONE, `CS_A1_SRC_NONE,
`CS_FEEDBACK_DSBL, `CS_CI_SEL_CFGA, `CS_SI_SEL_CFGA,
`CS_CMP_SEL_CFGA, /*CFGRAM0: IDLE : Do nothing*/
`CS_ALU_OP__XOR, `CS_SRCA_A0, `CS_SRCB_A0,
`CS_SHFT_OP_PASS, `CS_A0_SRC__ALU, `CS_A1_SRC_NONE,
`CS_FEEDBACK_DSBL, `CS_CI_SEL_CFGA, `CS_SI_SEL_CFGA,
`CS_CMP_SEL_CFGA, /*CFGRAM1: CLEAR : A0<=ALU<=0;*/
`CS_ALU_OP__ADD, `CS_SRCA_A0, `CS_SRCB_D0,
`CS_SHFT_OP_PASS, `CS_A0_SRC__ALU, `CS_A1_SRC_NONE,
`CS_FEEDBACK_DSBL, `CS_CI_SEL_CFGA, `CS_SI_SEL_CFGA,
`CS_CMP_SEL_CFGA, /*CFGRAM2: ADD : A0<=ALU<=A0+D0;*/
`CS_ALU_OP__ADD, `CS_SRCA_A0, `CS_SRCB_A0,
`CS_SHFT_OP_PASS, `CS_A0_SRC__ALU, `CS_A1_SRC_NONE,
`CS_FEEDBACK_DSBL, `CS_CI_SEL_CFGA, `CS_SI_SEL_CFGA,
`CS_CMP_SEL_CFGA, /*CFGRAM3: DOUBLE : A0<=ALU<=A0+A0;*/
`CS_ALU_OP_PASS, `CS_SRCA_A0, `CS_SRCB_D0,
`CS_SHFT_OP_PASS, `CS_A0_SRC_NONE, `CS_A1_SRC_NONE,
`CS_FEEDBACK_DSBL, `CS_CI_SEL_CFGA, `CS_SI_SEL_CFGA,
`CS_CMP_SEL_CFGA, /*CFGRAM4: */
`CS_ALU_OP_PASS, `CS_SRCA_A0, `CS_SRCB_D0,
`CS_SHFT_OP_PASS, `CS_A0_SRC_NONE, `CS_A1_SRC_NONE,
`CS_FEEDBACK_DSBL, `CS_CI_SEL_CFGA, `CS_SI_SEL_CFGA,
`CS_CMP_SEL_CFGA, /*CFGRAM5: */
`CS_ALU_OP_PASS, `CS_SRCA_A0, `CS_SRCB_D0,
`CS_SHFT_OP_PASS, `CS_A0_SRC_NONE, `CS_A1_SRC_NONE,
`CS_FEEDBACK_DSBL, `CS_CI_SEL_CFGA, `CS_SI_SEL_CFGA,
`CS_CMP_SEL_CFGA, /*CFGRAM6: */
`CS_ALU_OP_PASS, `CS_SRCA_A0, `CS_SRCB_D0,
`CS_SHFT_OP_PASS, `CS_A0_SRC_NONE, `CS_A1_SRC_NONE,
`CS_FEEDBACK_DSBL, `CS_CI_SEL_CFGA, `CS_SI_SEL_CFGA,
`CS_CMP_SEL_CFGA, /*CFGRAM7: */
8'hFF, 8'h00, /*CFG9: */
8'hFF, 8'hFF, /*CFG11-10: */
`SC_CMPB_A1_D1, `SC_CMPA_A1_D1, `SC_CI_B_ARITH,
`SC_CI_A_ARITH, `SC_C1_MASK_DSBL, `SC_C0_MASK_DSBL,
`SC_A_MASK_DSBL, `SC_DEF_SI_0, `SC_SI_B_DEFSI,
`SC_SI_A_DEFSI, /*CFG13-12: */
`SC_A0_SRC_ACC, `SC_SHIFT_SL, 1'h0,
1'h0, `SC_FIFO1__A0, `SC_FIFO0_BUS,
`SC_MSB_DSBL, `SC_MSB_BIT0, `SC_MSB_NOCHN,
`SC_FB_NOCHN, `SC_CMP1_NOCHN,
`SC_CMP0_NOCHN, /*CFG15-14: */
10'h00, `SC_FIFO_CLK__DP,`SC_FIFO_CAP_AX,
`SC_FIFO_LEVEL,`SC_FIFO__SYNC,`SC_EXTCRC_DSBL,
`SC_WRK16CAT_DSBL /*CFG17-16: */
}
)) dp(
/* input */ .reset(reset),
/* input */ .clk(clock),
/* input [02:00] */ .cs_addr(addr),
/* input */ .route_si(1'b0),
/* input */ .route_ci(1'b0),
/* input */ .f0_load(1'b0),
/* input */ .f1_load(f1_load),
/* input */ .d0_load(d0_load),
/* input */ .d1_load(1'b0),
/* output */ .ce0(),
/* output */ .cl0(),
/* output */ .z0(),
/* output */ .ff0(),
/* output */ .ce1(),
/* output */ .cl1(),
/* output */ .z1(),
/* output */ .ff1(),
/* output */ .ov_msb(),
/* output */ .co_msb(),
/* output */ .cmsb(),
/* output */ .so(),
/* output */ .f0_bus_stat(),
/* output */ .f0_blk_stat(f0_empty),
/* output */ .f1_bus_stat(),
/* output */ .f1_blk_stat(f1_full)
);
//`#end` -- edit above this line, do not edit this line
endmodule
//`#start footer` -- edit after this line, do not edit this line
//`#end` -- edit above this line, do not edit this line
ステートマシンのそれぞれの状態に応じて、データパスの構成が変更されていきますが、これは、データパスの制御信号 cs_addr に与えるアドレスで指定することができます。
おおまかには、前回の8段 FIFO の実装を踏襲したものになっています。
データパスの設定
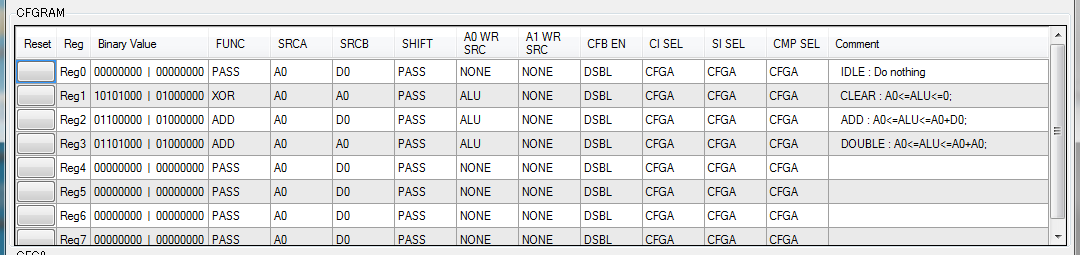
データパスの CGRAM は、 Reg0 から Reg3 までの4つの設定を使っています。 それぞれの設定には、 IDLE, GET, ADD, DOUBLE の名前がつけてあり、データフロー図と Verilog 記述に対応させています。

そのほかの設定では、 F1 INSEL を ALU に設定して、 FIFO1 への書き込みを ALU から行うようにしています。
倍増器へ書き込むテストプログラム
動作確認を行うために、テストプログラムを作成しました。 前回の FIFO を扱うプログラムと同様に FIFO0 に値を書き込み、 FIFO1 から値を読み出しています。
/* ========================================
*
* Copyright noritan.org, 2013
* All Rights Reserved
* UNPUBLISHED, LICENSED SOFTWARE.
*
* CONFIDENTIAL AND PROPRIETARY INFORMATION
* WHICH IS THE PROPERTY OF NORITAN.ORG.
*
* ========================================
*/
#include <device.h>
void main()
{
uint8 i = 0;
uint8 v[16];
volatile uint8 w = 0;
CR1_Write(1);
CY_SET_REG8(Doubler_dp_u0__F0_REG, w++);
for (i = 0; i < 16; i++) {
CY_SET_REG8(Doubler_dp_u0__F0_REG, w++);
v[ i] = CY_GET_REG8(Doubler_dp_u0__F1_REG);
}
LCD_Start();
LCD_Position(0, 0);
for (i = 0; i < 8; i++) {
LCD_PrintInt8(v[i]);
}
LCD_Position(1, 0);
for (i = 8; i < 16; i++) {
LCD_PrintInt8(v[i]);
}
CY_SET_REG8(Doubler_dp_u0__F0_REG, i++);
CY_SET_REG8(Doubler_dp_u0__F0_REG, i++);
/* CyGlobalIntEnable; */ /* Uncomment this line to enable global interrupts. */
for(;;)
{
CY_SET_REG8(Doubler_dp_u0__F0_REG, i++);
w = CY_GET_REG8(Doubler_dp_u0__F1_REG);
}
}
/* [] END OF FILE */
前回同様、 0 から 15 までの値を FIFO0 に書き込みながら、 FIFO1 から演算結果を取り出し、 LCD に表示します。 最初の部分をよく見るとわかりますが、 FIFO0 への書き込みが、1バイトだけ先行しています。 これは、 FIFO0 に書き込んでから FIFO1 にデータが準備できるまで、6クロック必要になるので、単純な書き込みと読み出しでは、処理が間に合わないためです。 書き込みを先行させることで、確実に処理が終わってから値を読み出す、いわゆるパイプライン構成にすることができました。
シフタを使った実装

データパスに内蔵されている ALU は、さらに複雑な計算を行わせることができます。 ここでは、 ALU 演算の出口部分にあるシフタを利用して、元の値を二倍にします。
このデータフロー図は、最初のデータフロー図とよく似ていますが、二つの状態 ADD と DOUBLE がひとつの状態 STEP1 にまとめられています。 これは、 ALU の出力にシフタと呼ばれる仕掛けがあるからです。 シフタは、 ALU の出力を1ビットだけ、右または左にシフトします。 値は、右にシフトすると 1/2 になり、左にシフトすると2倍になります。 つまり、2倍の値を得るために ALU の加算を使う必要がありません。
STEP1 状態では、 A0 と D0 の値を足して、シフタで2倍にして、 A0 に格納しています。 結果として、 A0 には、 D0 の値 "d" の2倍の値が入るというわけです。

ALU の設定も3種類に減りました。 シフタの操作は、 SHIFT カラムで決定します。
プロジェクトアーカイブ
この記事を書くために作成したプロジェクトは、このファイルの拡張子を ZIP に変更して展開すると再現できます。
関連文献
")
シリーズ最強!PSoC 3ボード+デバッグ・ボード: あのPSoCが生まれ変わった!アナログもディジタルも一新 (トライアルシリーズ)
- 作者: 古平 晃洋
- 出版社/メーカー: CQ出版
- 発売日: 2012/10/23
- メディア: 単行本
2013-05-22 23:21
nice!(0)
コメント(0)
トラックバック(0)




{kind=link}
コメント 0